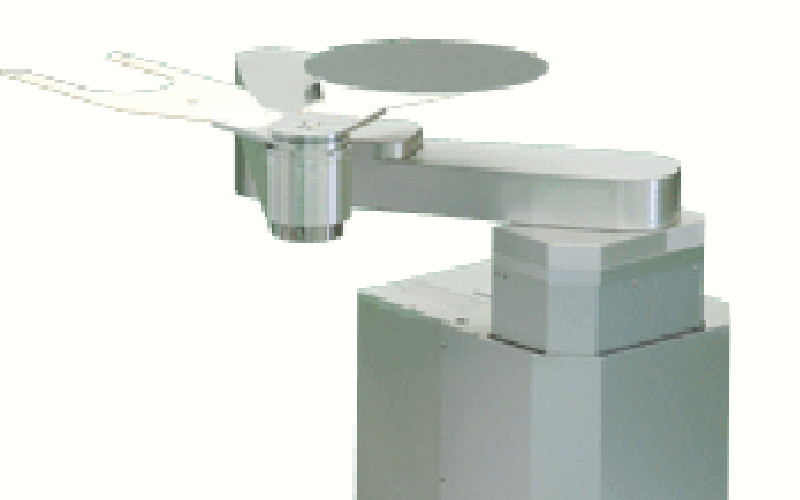
Voor ASML heb ik voor een SCARA robot die bestaat uit een bovenarm, onderarm en hand, het kinematische model gemaakt. Uit de gewenste bewegingsprofielen heb ik met behulp van dit model bepaald welke koppels en snelheden benodigd zijn voor de servomotoren. Dit model is gemaakt in Matlab/Simulink.
Daarnaast heb ik enkele aandrijfconcepten gesimuleerd, zoals een direct drive torque moto, en aandrijvingen met wormwiel of harmonic drive. Ik heb een dynamisch model gemaakt van de aandrijfelementen, zodat tesamen met een regeltechnicus kon worden bepaald welk concept het meest robuust was. Dat concept is verder uitgewerkt. De robot is gebouwd in 2009.